
主要是通过高分辨率,高清晰度的高清图片提高车牌识别率。分辨率由标清情况下的704*288提高到高清情况下的100万、200万、300万像素可选;视野范围不仅能看清车牌,更能覆盖到能够看清车型的更大区域,车道可以控制的更宽,车的进入角度可接受更大;清晰度受高汉字分辨率控制,大大提升了汉字识别率。
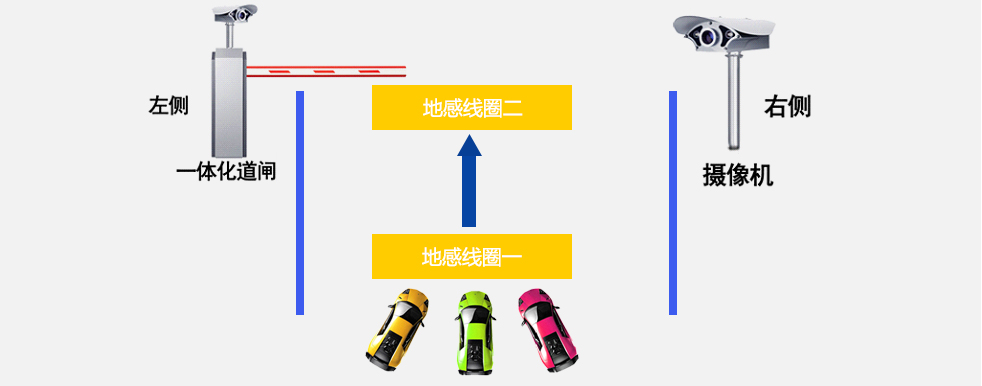
采用主从模式的多台摄像机进行立体识别,主从摄像机同时抓拍识别,主摄像机加入智能仲裁算法选取最优识别结果进行控制。从而解决车牌识别技术对于道路、角度等方面的苛刻要求的同时提高识别率。增大路宽,减少车道长度,无摆正距离要求,提高了产品的适应性。车辆各种角度、方向进入,都能抓拍到清晰的可识别图片。
受现场环境制约,车牌表面和摄像轴线无法做到垂直,导致车牌发生畸变,远离摄像机的位置字符变小,对识别造成一定的困难。畸变校准算法采用多色彩空间进行车牌底色检测,准确定位车牌区域,获取车牌倾斜角度及横向变形比例,最大倾斜角度达到25°,安全角度15°内的准确校准率达到99%以上。
受现场环境制约,车牌表面和摄像轴线无法做到垂直,导致车牌发生畸变,远离摄像机的位置字符变小,对识别造成一定的困难。畸变校准算法采用多色彩空间进行车牌底色检测,准确定位车牌区域,获取车牌倾斜角度及横向变形比例,最大倾斜角度达到25°,安全角度15°内的准确校准率达到99%以上。
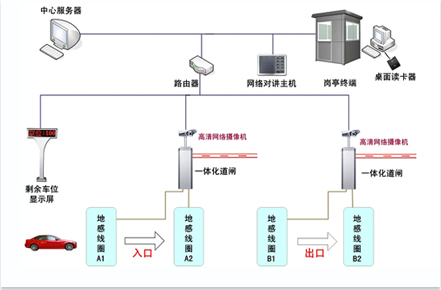
与传统摄像机音频线、视频线等多种连接方式不同,嵌入式立体车牌识别系统采用TCP/IP网络方式,一根电源线和几根网线即可完成整体系统连通,使得系统布线、施工、维护更加容易和便捷。系统可利用现有网络进行连接,不需要重复布线,大大节省了施工成本。由于TCP\IP网络用户非常普遍,所以在操作方法上也更容易被管理人员接受。

以车牌区域进行测光,对车牌区域进行焦点连动的自动曝光算法,从而获得最佳曝光效果。根据车牌区域的亮度值分析来自动调整曝光参数,如快门、感光度、增益等各项参数,可以逐帧调整,反应快速,确保车牌区域的最佳曝光效果,从而提高车牌识别率。使用码流和抓拍两套曝光参数,自动切换调整,码流效果与实际视觉效果一致同时也便于调试。目前已成功解决白天大逆光的欠曝问题、大迎光的过曝问题;夜间的过曝、欠曝问题等。